

-
L’univers des robots: environ ½ heure
Activité autour de ces différents robots, répondre aux questions questions : Quel est leur utilisation ? dans quel secteur sont-ils utilisés ? Qui a déjà utilisé ou même programmé un robot ? faire partager les expériences de chacun.




Définition : Un robot est un appareil programmable qui suit un comportement imposé.
-
Première approche de Thymio :
Faire manipuler le robot pour découvrir le fonctionnement, les différents capteurs et les modes préprogrammés.
Allumer le robot (toucher le rond central)
Tester le mode « obéissant » (toucher n’importe quelle flèche jusqu’à sélectionner la couleur violette, puis confirmer en touchant le rond central), le robot va alors suivre les instructions données lorsque l’on touchera les flèches directionnelles.
Essayer de l’envoyer à son voisin, saurez-vous le faire accélérer ? Rmq dans ce mode c’est à vous de faire en sorte que le robot évite les obstacles.
Tester le mode « amical » (sélectionner la couleur verte), le robot va suivre votre main.
Comment arrive-t-il à suivre votre main ?
Tester le mode « attentif » (sélectionner la couleur bleu foncé), le robot va réagir au bruit.
Ceci n’est qu’un aperçu de toutes les capacités de Thymio, le robot a 5 autres comportements préenregistrés (testez les si vous avez le temps) mais avec votre imagination, vous serez capables d’ici la fin du cours d’en créer des nouveaux.
-
Introduction aux interfaces du robot :
D’après vos observations. Comment le robot réagit-il avec l’extérieur ?
Réponse : Thymio possède 2 roues, 5 capteurs d’obstacles à l’avant, 2 capteurs de sol pour lui permettre de suivre un circuit, un capteur infrarouge (pour réagir aux ordres d’une télécommande), un capteur de température, un micro, un haut-parleur et un support pour crayon .
Les aviez-vous tous trouvés ?
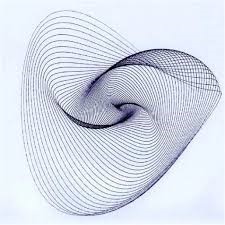
Voici l’étendue des outils au service de votre imagination. Thymio pourrait tout à fait être programmé pour migrer vers des zones chaudes, passer du AC-DC ou même réaliser un dessin.
Bien entendu, vous n’allez pas reproduire la Joconde tout de suite, mais avec un peu de patience après avoir suivi ce cours, vous pourrez lui faire faire de tels dessins :

-
Comment Thymio peut-il adopter un comportement ?
En fait Thymio fait exactement ce qu’on lui demande … en lignes de codes !
Mais pas de panique, ces lignes de codes barbares au premier abord sont en fait des traductions de règles que l’on lui donnera.
Exemple :
Allumez Thymio en mode explorateur
Ici le Robot suit une consigne :
SI je rencontre un obstacle, ALORS je l’évite.
Mais comment Thymio sait-il qu’il y a un obstacle ? Grâce aux capteurs vus précédemment
Alors lorsque vous coderez, il faudra préciser :
SI mon capteur détecte un obstacle, ALORS je change de direction.
A vous maintenant, essayez de formuler une consigne du genre (Si bidule, Alors machin) avec le mode Obéissant.
Plusieurs réponses possibles : Si mon bouton directionnel droit est sollicité, Alors je tourne à droite / Si mon bouton central est sollicité, Alors je m’arrête
Plus généralement, vous remarquerez que beaucoup de fonctions du robot peuvent être justifiées par une telle consigne « Si tartanpion, Alors machin » qui est une des plus répandues en informatique.
Remarque : Plus tard vous découvrirez une autre consigne classique :
TANT QUE …, ALORS JE FAIS…
Vous venez de découvrir (ou redécouvrir) le monde de la logique !
Il va désormais falloir traduire ces consignes dans un langage que Thymio comprend : le langage Aseba.
Mais avant de coder quoi que ce soit, mieux vaut d’abord formuler en français la consigne que l’on s’apprête à donner.
N’oubliez jamais de dédramatiser lorsque vous voyez un code, il n’est qu’une formulation certes un peu barbare de telles consignes en français de Molière.
Par Pierre-Eyves NICOLLE.